
Hi everyone,
After a long time, I’m here again. Actually, I did many works and studies but I didn’t have enough time to write them here. Today, I want to talk about tilt measurement, as you know I’ve been working on space vehicle technologies such as rocket and satellite, and it is really important to measure the tilt of vehicles for these projects.
Before we begin, I highly recommend you read these documents;
- How to Use a Three-Axis Accelerometer for Tilt Sensing
- Measuring Tilt Angle with Gyro and Accelerometer
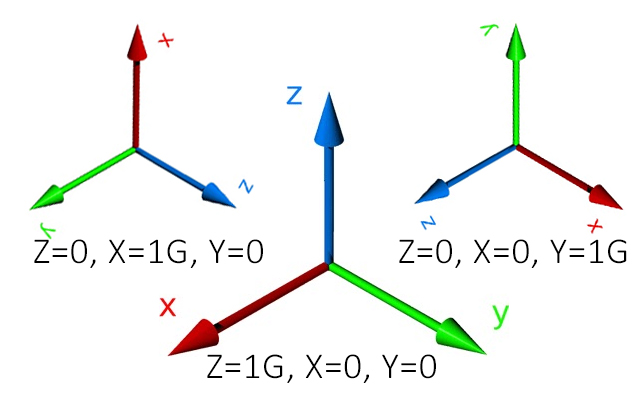
In our first implementation, we will measure the tilt of static objects using an accelerometer. As you read in documents above, if your object doesn’t move, you can measure the tilt using an accelerometer thanks to the euclidian equation and G values of each axes.
In my example, I used an MPU6050 sensor to measure G-forces and MATLAB to simulate its tilt. I believe in that, you can understand the principle of this method thanks to documents above, so I only share the source code of Arduino implementation and MATLAB script.
Here is the source code of this example.
Have fun!
Leave a Reply